
Situational awareness
The precursor of decision-making
The art of robotic surgery requires two operators. It may seem unthinkable that a surgeon might be at the controls of the robot without having an assistant beside the patient. And yet…
“I have a problem … everything’s gone!”
The operation seems to be relatively straightforward, the techniques are known and the patient is uncomplicated. Dialogue is kept short in the operating room, where one person’s comment seldom calls for a response from the other.
” I have a problem … everything’s gone!” The sudden announcement of the assistant breaks the quiet of the OR. His monitor screen has suddenly gone off without warning. “OK … It’s gone” immediately replies the surgeon, his head still buried in his console.

Understanding from this that the entire camera system has just gone off, the assistant goes to the video cart to try to fix this annoying glitch. The surgeon has still not taken his head out of the console, and he even continues to manipulate the robot arms.
This unlikely situation goes on for 4½ minutes, until the two team members realize that they are dangerously divided.
Are you aware?
The model of “situational awareness“ or “situation awareness“, as defined by Endsley¹ in 1995, provides insight into this event.
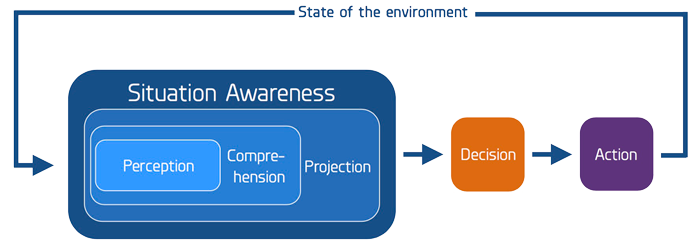
According to the SA (Situational Awareness) model, the first stage in the analysis of a situation consists of perceiving our environment through our senses. We then process the data we’ve received, and then we project a future state. These three steps together are called Situation Awareness. This is a dynamic process based on the actual state of the environment, subjected to cognitive handling, from which a particular output is probable. This output feeds the decision-making process that guides our actions.
So what?
Ideally, this repeated process leads only to optimal situations. Thus, our surgical team should not have split. The problem is that the “virtuous circle” of SA is sensitive to both internal and environmental influences:
- The surgeon’s visual perception is limited to a few square inches of his surgical area
- The auditory perception of two members of the team is weakened by fragmentary and somewhat halting communications²
These limited perceptions can lead to misunderstandings between the surgeon and his assistant, and therefore to non-suitable projections towards a future state. The resulting decisions and actions can only be a poor fit.
So what actually happened?
When the assistant announced “I have a problem … everything’s gone!” he meant that he had no picture any more on his video monitor. At the exact same time, the surgeon also had a problem (momentary loss of picture), and then “…gone” (the video is back, so the problem is gone). He therefore replied “OK … It’s gone” meaning that his problem was over, so he could continue to operate.
Incredible? But true.
Fortunately, this event took place during a “robotic surgical training” workshop at Nancy School of Surgery. One of the supervisors of the session had discreetly disconnected the monitor used by the assistant. Disconnecting this cable had the side effect of causing a micro video cutoff at the surgeon’s console.
During the debriefing of this Medical Team Training session, the surgeon appreciated the need to take one’s head out of the console when an unexpected event occurs in the OR. This team has also decided to adopt a so-called “secured communication” protocol which leaves no room for doubt.
One has to be aware of the limits of perception, of understanding and of projecting into the future if one is to generate the strategies for an appropriate level of situational awareness.

¹ : Mica R. Endsley, “Toward a Theory of Situation Awareness in Dynamic Systems”, Human Factors and Ergonomics Society, 1995, 37(1), 32-64
² : We will analyse soon the safe communication methods.